Proyect: A MicroMouseBot
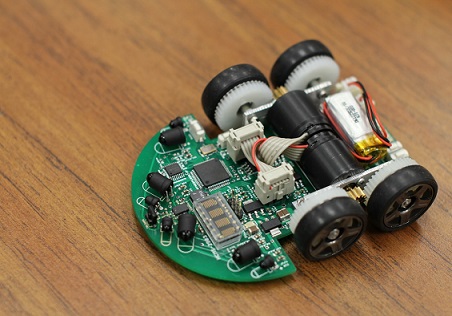
Yesterday I begin with a new project a micromouse robot, this is a little race car which goal is to get the quick as posible to the center of a laberyth, you can check this video to watch a real competition: (LINK TO VIDEO).
I take this project to learn, so I will not get others designs to have a functional robot working as fast as posible, obviusly i will take a look to comunity`s work and try to understand how it works and to get some ideas to do mine, but my main strategy is to make fails take note of it an solve it the best way.
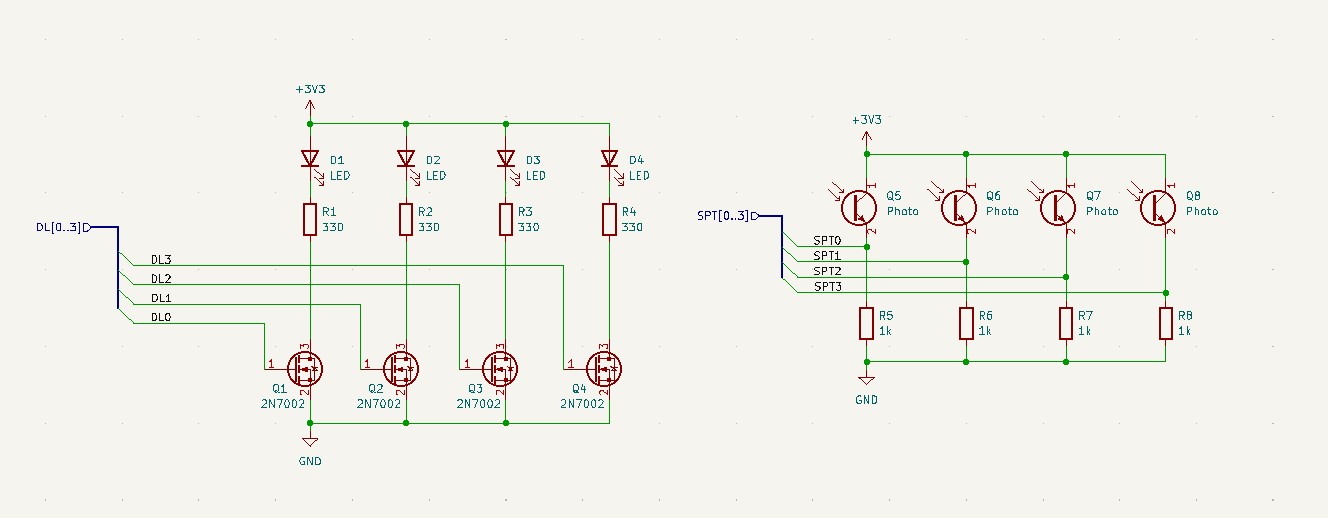
I begin with the distantes sensors, all the pictures I saw of this bots use IR leds and phototransistors, the way i think it work is simple, you produce some ligth with the LED, this light bounce when it get to a wall and the phototransistor let pass more current throught drain-source more near you are to the wall, taking note of this, I put 5 pairs of leds-phototransistors and the result circuit is this: